物聯(lián)網(wǎng)之父凱文·艾什頓 車聯(lián)網(wǎng),駛向智慧城市的引擎
被譽為“物聯(lián)網(wǎng)之父”的凱文·艾什頓(Kevin Ashton)在一次科技峰會上發(fā)表長篇主旨演講,深度剖析了物聯(lián)網(wǎng)(IoT)核心思想在車聯(lián)網(wǎng)(IoV)領域的演化與實踐,并描繪了一幅由車聯(lián)網(wǎng)驅(qū)動的未來智慧交通與城市藍圖。
艾什頓開篇重溫了其1999年提出“物聯(lián)網(wǎng)”概念的初心:讓物理世界的數(shù)據(jù)能被計算機自動捕獲、處理與利用,從而減少對人工輸入的依賴,實現(xiàn)更智能的決策。他指出,車聯(lián)網(wǎng)并非孤立的新概念,而是物聯(lián)網(wǎng)在交通領域最復雜、最具代表性的延伸與實踐。汽車,正從單純的交通工具,演變?yōu)橐粋€集成了無數(shù)傳感器、具備強大計算與通信能力的“超級移動智能節(jié)點”。
演講的核心部分,艾什頓聚焦于車聯(lián)網(wǎng)科技的三大支柱與未來愿景:
第一,感知與互聯(lián):從“信息孤島”到“神經(jīng)網(wǎng)絡”。
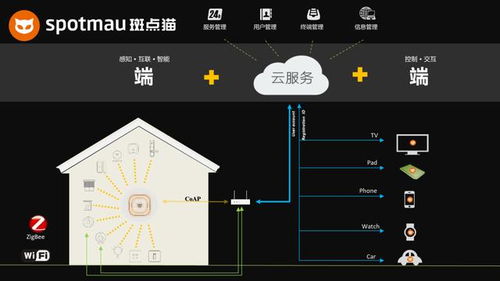
現(xiàn)代汽車已裝備了攝像頭、雷達、激光雷達(LiDAR)、GPS以及大量監(jiān)測車輛自身狀態(tài)的傳感器。車聯(lián)網(wǎng)的關鍵突破在于,通過5G、C-V2X(蜂窩車聯(lián)網(wǎng))等技術(shù),將這些數(shù)據(jù)實時、高速、可靠地“說出去”并與周圍環(huán)境“對話”。車輛與車輛(V2V)、車輛與基礎設施(V2I)、車輛與網(wǎng)絡(V2N)、車輛與行人(V2P)實現(xiàn)全方位互聯(lián)。艾什頓強調(diào),這種網(wǎng)狀互聯(lián)構(gòu)建了道路的“數(shù)字孿生”,使每一輛車都能獲得遠超自身傳感器范圍的全局態(tài)勢感知,這是實現(xiàn)高階自動駕駛和協(xié)同駕駛的基礎。
第二,數(shù)據(jù)與智能:從“反應式駕駛”到“預測式服務”。
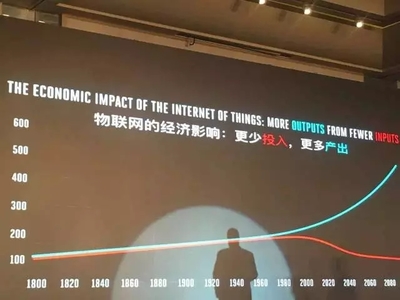
海量的實時數(shù)據(jù)流入云端或邊緣計算平臺,通過人工智能與機器學習算法進行處理。這不僅能用于實時導航避堵、預警潛在碰撞,更能實現(xiàn)預測性維護(在零件故障前發(fā)出提醒)、個性化保險(基于駕駛行為定價),以及優(yōu)化城市交通流量。艾什頓舉例,未來的交通信號燈將不再是固定時序,而是根據(jù)實時車流動態(tài)調(diào)整;你的愛車可能會在你下班前,根據(jù)日歷和交通狀況,自動建議最佳出發(fā)時間并預約充電樁。車聯(lián)網(wǎng)使交通系統(tǒng)從被動反應轉(zhuǎn)向主動預測與協(xié)調(diào)。
第三,生態(tài)與變革:重塑出行與城市形態(tài)。
艾什頓展望,車聯(lián)網(wǎng)將催生全新的移動即服務(MaaS)模式。個人車輛所有權(quán)可能不再是主流,取而代之的是按需使用的自動駕駛共享車隊。這將極大提升車輛利用率,減少擁堵和停車空間需求,并降低碳排放。更深層次上,車聯(lián)網(wǎng)與智慧城市深度融合,將重新規(guī)劃城市空間布局——釋放出的停車用地可轉(zhuǎn)化為綠地或公共空間,道路設計也將更加以人為本。
在演講的艾什頓也嚴肅地指出了面臨的挑戰(zhàn):數(shù)據(jù)安全與隱私保護、網(wǎng)絡攻擊的潛在風險、行業(yè)標準與協(xié)議的全球統(tǒng)一、以及法律法規(guī)如何跟上技術(shù)創(chuàng)新的步伐。他呼吁產(chǎn)業(yè)界、政府和學術(shù)界必須攜手合作,建立開放、安全、可信的車聯(lián)網(wǎng)生態(tài)系統(tǒng)。
“物聯(lián)網(wǎng)的最終愿景,是讓世界無需我們的干預而自行運轉(zhuǎn),變得更加高效、安全、可持續(xù)。”艾什頓道,“車聯(lián)網(wǎng),正是這一愿景在道路上最激動人心的體現(xiàn)。我們不是在單純地連接汽車,我們是在編織一個更智慧、更流暢的移動未來。”
這場演講不僅梳理了車聯(lián)網(wǎng)的技術(shù)脈絡,更將其置于物聯(lián)網(wǎng)宏大敘事與人類社會發(fā)展的背景下,為所有從業(yè)者與觀察家提供了深刻的啟示與前瞻的視野。
如若轉(zhuǎn)載,請注明出處:http://www.qrs6.cn/product/83.html
更新時間:2026-06-10 05:04:28